sabertooth-usb
Version:
API for controlling USB-enabled Sabertooth motor drivers running in Packet Serial mode
201 lines (200 loc) • 8.28 kB
TypeScript
import SerialPort from 'serialport';
export declare type SingleChannel = 1 | 2;
export declare type Channel = 1 | 2 | '*';
export declare enum GetType {
Value = 0,
Battery = 16,
Current = 32,
Temperature = 64
}
export declare enum SetType {
Value = 0,
KeepAlive = 16,
Shutdown = 32,
Timeout = 64
}
export declare enum Command {
Set = 40,
Get = 41
}
export declare enum Type {
Motor = 77,
Freewheel = 81,
Signal = 83,
Aux = 65,
Power = 80,
CurrentLimit = 84,
Ramping = 82
}
export declare enum MixedModeMotor {
Drive = 68,
Turn = 84
}
/** Sabertooth USB connection options. */
export declare type Options = {
/** Serial baud rate, options are 2400, 9600, 19200, 38400 and 115200. Default is 38400. */
baudRate?: number;
/** The timeout for get requests, in ms. Default is 1000. 0 indicates timeout is disabled. */
timeout?: number;
/** The address of the Sabertooth. Default is 128. */
address?: number;
/** The number of times to attempt a get request. Default is 3. */
maxGetAttemptCount?: number;
/** Flag to enable debug console.log messages. Default is false. */
debug?: boolean;
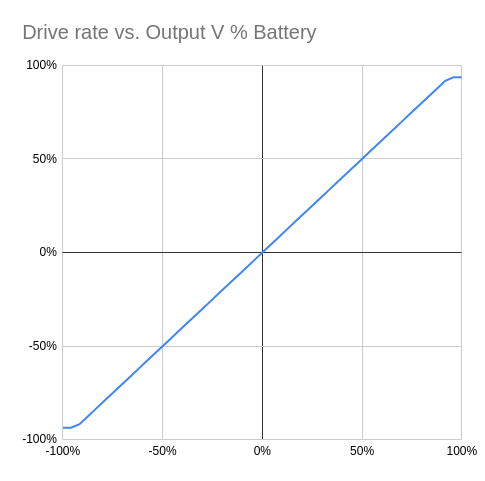
/**
* Maximum motor output as proportion of battery input, in range [0, 1].
* Default is 0.95 (95%).
* Set to 1 to disable maximum output rate compensation.
*
* The actual output motor voltage for a given input drive rate is non-linear above approximately a 95% drive rate;
* the output motor voltage is capped at approximately 95% of the battery voltage (see image below).
*
* When `maxMotorOutputRate` is set to a value < 1, a given drive rate is adjusted by scaling it with `rate * maxMotorOutputRate`.
* This provides for a linear relationship between the input drive rate and the actual motor output voltage.
*
* 
*/
maxMotorOutputRate?: number;
/**
* Motor current denoise exponential moving average factor.
* Range is (0, 1]. Larger value means less de-noising.
* Set to 1 to disable denoising. Default is 0.1.
*/
motorCurrentDenoiseAlpha?: number;
};
/**
* Controls USB-enabled Sabertooth motor drivers running in Packet Serial mode.
*
* See https://www.dimensionengineering.com/datasheets/USBSabertoothPacketSerialReference.pdf
*
* Note: Only Checksum protection is implemented, not CRC.
*/
export declare class SabertoothUSB {
/** The path for the USB serial port this SabertoothUSB is connected to. */
readonly path: string;
/** The address of the Sabertooth. */
readonly address: number;
/** The timeout for get requests, in ms. */
readonly timeout: number;
/** The number of retry attempts for get requests. */
readonly maxGetAttemptCount: number;
/** Flag indicating if console.log debug messages are enabled. */
readonly debug: boolean;
/** Maximum motor output as proportion of battery input. */
readonly maxMotorOutputRate: number;
/** Motor current denoise exponential moving average factor. */
readonly motorCurrentDenoiseAlpha: number;
private serial;
private lastError;
private motorCurrentExponetialAverage;
/**
* Create an object to control a motor driver.
*
* A connection to the motor driver will be attempted upon creation but
* this is asynchronous and is not available immediately after creation.
* If the connection fails reconnection will be attempted automatically.
*
* @param path the path to the (USB) serial port. eg `/dev/ttyACM0` or `COM1`.
* @param options Optional connection options. See `Options` type for details.
*/
constructor(path: string, options?: Options);
/** Returns true iff the USB serial connection to the motor driver is open and working. */
isConnected: () => boolean;
/** Get the last error that occurred in the connection to the motor driver. */
getLastError: () => Error;
private checkRange;
/**
* Controls the specified motor output(s).
* This sets the output of the motor channel as a fraction of the battery voltage.
* Note that the given rate is scaled by the `maxMotorOutputRate`.
*
* @param channel the motor channel(s), either `1`, `2`, or `*` for all motors.
* @param rate the new rate for the motor(s), in range [-1, 1] for maximum reverse to maximum forward respectively.
*/
setMotor(channel: Channel, rate: number): void;
/**
* Controls the specified power output, if the power output is configured as a controllable output.
*
* @param channel the power channel(s), either `1`, `2`, or `*` for all channels.
* @param rate the new rate for the power output(s), in range [-1, 1]
*/
setPower(channel: Channel, rate: number): void;
/**
* Controls the mixed-mode (differential) drive rate.
* Note that the given rate is scaled by the `maxMotorOutputRate`.
*
* @param rate the new drive rate for the motors, in range [-1, 1] for maximum reverse to maximum forward respectively.
*/
setDrive(rate: number): void;
/**
* Controls the mixed-mode (differential) turn rate.
*
* @param rate the new turn rate for the motors, in range [-1, 1] for maximum left to maximum right respectively.
*/
setTurn(rate: number): void;
/**
* Enables or disables freewheeling for the specified motor output(s).
*
* @param channel the motor channel(s), either `1`, `2`, or `*` for all motors.
* @param enableFreewheel True to enable freewheeling, false to disable freewheeling.
*/
setFreewheel(channel: Channel, enableFreewheel: boolean): void;
/**
* Shuts down motor or power output(s).
*
* @param type The type of output to shutdown, either `SetType.Motor` or `SetType.Power`
* @param channel the channel(s), either `1`, `2`, or `*` for all channels.
* @param enableFreewheel True to trigger shutdown, false to clear the shutdown.
*/
shutDown(type: Type.Motor | Type.Power, channel: Channel, shutdownEnabled: boolean): void;
/**
* Sets the current limit for the specified motor output channel.
*
* @param channel the motor channel(s), either `1`, `2`, or `*` for all channels.
* @param currentLimit the new current limit on Amps, in range (0, 100], or -1 to use the default limit.
*/
setCurrentLimit(channel: Channel, currentLimit: number): void;
/**
* Sets the ramping for the specified motor output channel.
*
* @param channel the motor channel(s), either `1`, `2`, or `*` for all channels.
* @param ramping The ramping value, between -16383 (fast) and 2047 (slow).
*/
setRamping(channel: Channel, ramping: number): void;
/**
* Get the battery/source voltage.
*/
getBatteryVoltage(): Promise<number>;
/**
* Get the output transistor temperature for the specified motor channel, in degrees centigrade.
*/
getMotorDriverOutputTemperature(channel: SingleChannel): Promise<number>;
/**
* Get the output rate for the specified motor channel, in range [-1, 1].
*/
getMotorDriverOutputRate(channel: SingleChannel): Promise<number>;
/**
* Get the output current for the specified motor channel, in Amps.
* This is a noisy signal and may vary by up to several amps.
* Positive current values indicate energy is being drawn from the battery,
* and negative values indicate energy is being regenerated into the battery.
*/
getMotorCurrent(channel: SingleChannel): Promise<number>;
private get;
private set;
private sendCommand;
}
/** Get a list of the avilable Sabertooth devices.
* The return is an array of objects with fields like:
* ```
* manufacturer: 'Dimension Engineering',
* serialNumber: '1600DB368EC8',
* pnpId: 'usb-Dimension_Engineering_Sabertooth_2x32_1600DB368EC8-if01',
* locationId: undefined,
* vendorId: '268b',
* productId: '0201',
* path: '/dev/ttyACM0'
* ```
*/
export declare const listSabertoothDevices: () => Promise<SerialPort.PortInfo[]>;